12-01. 拡散方程式
01-01. 1次元の拡散方程式¶
1次元の拡散方程式のプログラムを書く. 固定境界条件( )でシミュレーションしてみよう.
# 01-01-01. 1次元の拡散方程式の関数定義
# 時間方向はオイラー法,空間方向は中心差分
def diff_eq_1d(u_arr, D, dh, dt):
new_u = u_arr[1] + D * ((u_arr[0] + u_arr[2] - 2 * u_arr[1]) / (dh**2)) * dt
return new_u# 01-01-02. 1次元拡散モデルのシミュレーション実行
import numpy as np
D = 1.0 # 拡散係数
dt = 0.05 # 時間方向の刻み幅
dx = 0.5 # 空間方向の刻み幅
u_0 = 1 # 境界条件 u(0,t) = u_0
x_e = 10 # xの終端
t_end = 50 # tの終端
x = np.arange(0, x_e, dx) # x座標
t_list = [] # 時刻を記録するリスト
u_list = [] # uを記録するリスト
u = np.zeros(len(x), dtype=float) # uの初期化
u[0] = u_0 # 境界条件 u(0,t) = u_0
u[-1] = 0 # 境界条件 u(x_e,t) = 0
t_list.append(0)
u_list.append(np.copy(u))
for n in range(1, int(t_end / dt) + 1):
t = n * dt # 時刻tの計算
u_tmp = np.zeros(len(x), dtype=float)
u_tmp[0] = u_0 # 境界条件 u(0,t) = u_0
for i in range(1, len(u) - 1):
u_tmp[i] = diff_eq_1d(u[(i - 1) : (i + 2)], D, dx, dt)
u_tmp[-1] = 0 # 境界条件 u(x_e,t) = 0
u = np.copy(u_tmp)
t_list.append(t)
u_list.append(np.copy(u))# 01-01-03. 結果の可視化
import matplotlib.pyplot as plt
plt.figure(dpi=100)
plt.ylim(-0.05, 1.05)
for i in range(0, len(u_list), 100):
plt.plot(x, u_list[i], ".-", label="t = " + str(t_list[i]))
plt.legend(bbox_to_anchor=(1.05, 1), loc="upper left")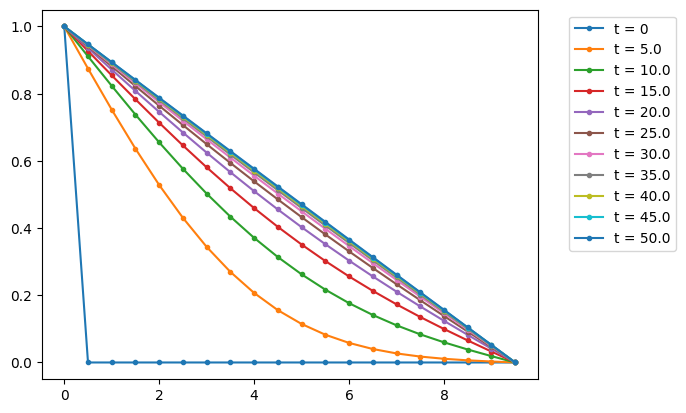
01-02. 2次元の拡散方程式¶
2次元の拡散方程式のプログラムを書く.周期境界条件でシミュレーションしてみよう. x軸方向,y軸方向とも空間方向の刻み幅1で,範囲はともに(-25,25)とする.初期条件はどこか1つの区画で100( )とする.
# 01-02-01. 2次元の拡散方程式の関数定義
def diff_eq_2d(u_arr, D, dh, dt):
new_u = (
u_arr[1, 1]
+ D
* (
(u_arr[0, 1] + u_arr[2, 1] + u_arr[1, 0] + u_arr[1, 2] - 4 * u_arr[1, 1])
/ (dh**2)
)
* dt
)
return new_u# 01-02-02. 2次元の拡散方程式に基づく更新
def update(field, D, dh, dt):
n_i, n_j = field.shape
new_field = np.zeros((n_i, n_j), dtype=field.dtype)
for i in range(n_i):
for j in range(n_j):
if i == 0:
if j == 0:
# 境界条件処理 i=0,j=0
new_field[i, j] = diff_eq_2d(
field[[-1, 0, 1], :][:, [-1, 0, 1]], D, dh, dt
)
elif 0 < j < n_j - 1:
# 境界条件処理 i=0,0<j<n_j-1
new_field[i, j] = diff_eq_2d(
field[[-1, 0, 1], :][:, [j - 1, j, j + 1]], D, dh, dt
)
elif j == n_j - 1:
# 境界条件処理 i=0,j=n_j-1
new_field[i, j] = diff_eq_2d(
field[[-1, 0, 1], :][:, [n_j - 2, n_j - 1, 0]], D, dh, dt
)
elif 0 < i < n_i - 1:
if j == 0:
# 境界条件処理 1<i<n_i-1,j=0
new_field[i, j] = diff_eq_2d(
field[[i - 1, i, i + 1], :][:, [-1, 0, 1]], D, dh, dt
)
elif 0 < j < n_j - 1:
# メイン (1<i<n_i-1,1<j<n_j-1)
new_field[i, j] = diff_eq_2d(
field[[i - 1, i, i + 1], :][:, [j - 1, j, j + 1]], D, dh, dt
)
elif j == n_j - 1:
# 境界条件処理 1<i<n_i-1,j=n_j-1
new_field[i, j] = diff_eq_2d(
field[[i - 1, i, i + 1], :][:, [n_j - 2, n_j - 1, 0]], D, dh, dt
)
elif i == n_i - 1:
if j == 0:
# 境界条件処理 i=n_i,j=0
new_field[i, j] = diff_eq_2d(
field[[n_i - 2, n_i - 1, 0], :][:, [-1, 0, 1]], D, dh, dt
)
elif 0 < j < n_j - 1:
# 境界条件処理 i=n_i-1,1<j<n_j-1
new_field[i, j] = diff_eq_2d(
field[[n_i - 2, n_i - 1, 0], :][:, [j - 1, j, j + 1]], D, dh, dt
)
elif j == n_j - 1:
# 境界条件処理 i=n_i-1,j=n_j-1
new_field[i, j] = diff_eq_2d(
field[[n_i - 2, n_i - 1, 0], :][:, [n_j - 2, n_j - 1, 0]],
D,
dh,
dt,
)
return new_field# 01-02-p. 2次元の拡散方程式の擬似コード
各種パラメータ,初期値の設定
場の設定(x,y)
結果を記録するリストの定義
uの初期化
for ステップ数 in 繰り返し回数:
時刻tの計算
# -- 状態遷移 --
u_tmp = update(u, D, dh, dt)
情報の更新
結果のリストへの記録# 01-02-03. 2次元拡散モデルのシミュレーション実行
D = 1.0 # 拡散係数
dt = 0.05 # 時間方向の刻み幅
dh = 1 # 空間方向の刻み幅
u_0 = 100 # uの初期濃度
x = np.arange(-25, 25, dh)
y = np.arange(-25, 25, dh)
xmesh, ymesh = np.meshgrid(x, y)
t_end = 50 # tの終端
t_list = [] # 時刻を記録するリスト
u_list = [] # uを記録するリスト
u = np.zeros([len(x), len(y)], dtype=float) # uの初期化
u[25, 25] = u_0 # 境界条件 u(0,t) = u_0
t_list.append(0)
u_list.append(np.copy(u))
for n in range(int(t_end / dt)):
t = (n + 1) * dt # 時刻tの計算
# -- 状態遷移 --
u_tmp = update(u, D, dh, dt)
# 情報の更新
t_list.append(t)
u = np.copy(u_tmp)
u_list.append(np.copy(u))# 01-02-04a. 結果の可視化
fig, ax = plt.subplots(dpi=150)
ax.set_aspect("equal")
pcm = ax.pcolormesh(xmesh, ymesh, u_list[200], alpha=0.75, vmin=0, vmax=1)
fig.colorbar(pcm, ax=ax, shrink=0.8)
plt.show()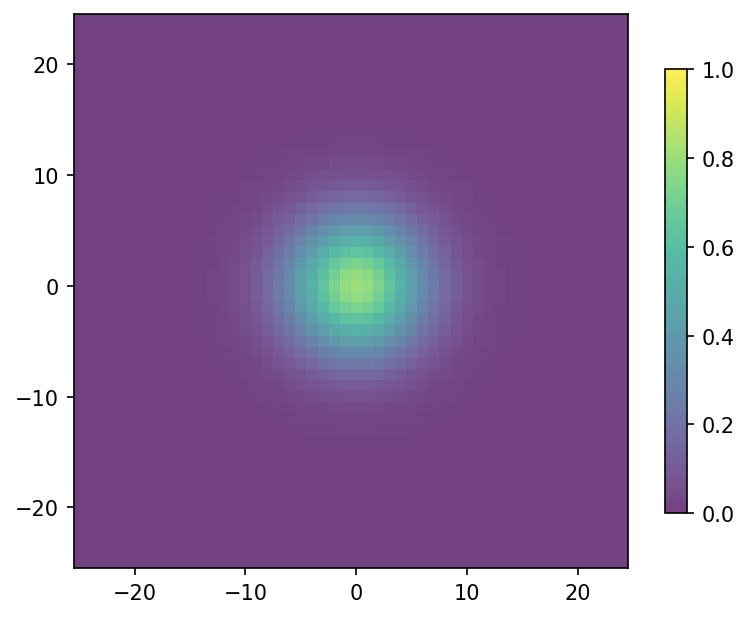
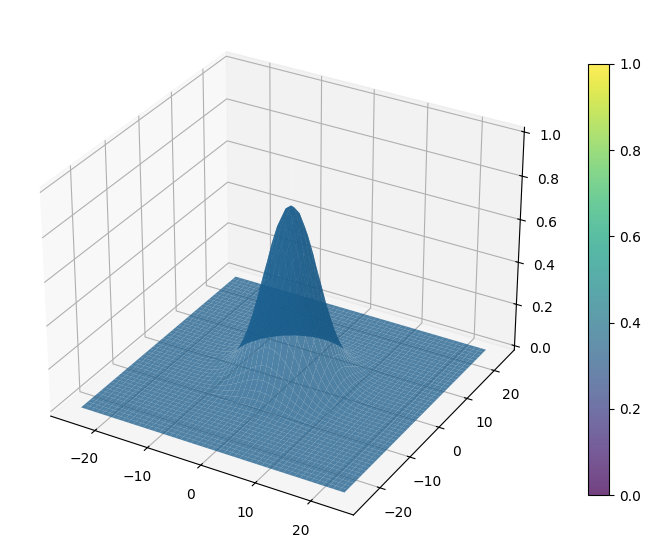
# 01-02-4b. 結果の可視化(3D)
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure(figsize=(10, 7))
ax = fig.add_subplot(111, projection="3d")
surf = ax.plot_surface(xmesh, ymesh, u_list[200], vmin=0, vmax=1, alpha=0.75)
ax.plot([0, 0], [0, 0], [0, 1], "w", alpha=0.1)
fig.colorbar(surf, shrink=0.8)
plt.grid()
plt.show()